��������߾��ȿ����о�
������Ⱥ
����Research for high speed motor vector control
����Zeng Qun
����Abstract��Common position sensors cannot achieve detection of the rotor position with high precision at high speed��which badly hinders the development of servo control for high-speed motors. In this paper a novel single-pole magnetic encoder has been proposed for precision feedback of rotor position of high speed motors��and a compensation algorithm for feedback lag has been put forward to ensure the control precision. Control experiment has been carried out with a permanent-magnet synchronous motor(PMSM)with 600 W��4 pairs of poles and the rated rotation speed of 20 000 r/min��and confirms the validity of vector control of high speed motor by using the position sensor proposed.
����Keywords��high speed permanent-magnet synchronous motor;magnetic encoder;vector control
����ժ Ҫ��λ�ô�����Ϊͨ�õ��ŷ�������ƴ�����������ͨ��λ�ô������ڵ�����������º���ʵ�ָ߾��ȵ�ת��λ�÷�������Լ�˸��ٵ����ʹ�úͷ�չ����Դ����⣬���ij����Ե������һ��ּ�ڵ��������ת�£����ܾ�ȷ����ת��λ�õĵ��Լ��ŵ��������ͬʱ���䷴���ͺ������Ҳ�������Ч�IJ�������������������֤ʵ�飬�����һ̨600W�ĶԼ����ת��20000,r/min ������ͬ��������п���ʵ�顣ʵ�����������˷�����Ч������λ�ô�����ʵ���˸��ٵ�����ŷ����ơ�
�����ؼ��ʣ�����ͬ�����;�ŵ������;ʸ������
�������ٵ��Խ��Խ�㷺��Ӧ���ڹ�ҵ�����µ�����.�ø��ٵ��ֱ���������أ� ��ʡȥ����װ�ã����ͻ�е�����������������Ч�ʺ����о��ȣ���С�豸���.Ŀǰ���ٵ����������ʽ��Ҫ���ñ�Ƶ���ٺ���λ�ô�������ֱ��ת�ؿ���.���ٵ���ĸ߾����ŷ����Ƽ�����չ����.����Ҫԭ�����ڣ������º���ʵ�ֶ�ת��λ�õľ�ȷ�������µ�ת��λ�ü�⼼�����ŷ�ϵͳ����ٸ߾��ȷ���չ��һ����Ҫ����.���ת��λ�õļ��ͨ����2�ַ�ʽ��һ������������ʽ(�����״̬�۲�ıƽ��㷨);��һ��������λ�ô�����(����������� �ŵ��������ͬ����Ӧ����).��λ�ô��еĿ��Ʒ�ʽ��Ŀǰ�ŷ���������о����ȵ㣬�������ϵͳ�ɿ��ԡ���߸��ٽο������ܵȷ�����һ�������ƣ���Ŀǰ��һ��������ʸ�����Ʒ��������ܹ�ʵ�ִ������������������������Ŀ��ƣ�������������ٶȷ�Χ��ȷ�ؿ��Ƶ�����У��������ھ�ȷ��λ�ÿ���.���ں��ߣ��������ṹ������Ԫ����Ӧʱ��ȷ���ľ���ʹ���ڸ��ٳ��ϵ�Ӧ���ܵ���Լ.�Թ�������Ϊ�����߾����ŷ�����ͨ��Ҫ��������ֱ���Ϊ 14~16 λ��������˸߾��ȵ��ŷ������У�Ҫʹ���ת�ٴﵽ10000r/min���ϣ� ��Ҫ�����Ԫ�������ﵽ2MHz����.����ӦƵ�ʵĹ���Ԫ���۸��䰺����˸ߵ���ӦƵ�����������˵�ǰ��������ҵ�ļ�������.�����������������ʵʱ��λ�÷�����ʽ���ڸ�ת��ʱ�����ź�Ƶ�ʹ��ߣ�ͨ�ſɿ��Ժ��ѱ�֤.�༫�ŵ������Ҳ����ͬ��������.
�������Ͽɼ�����Ŀǰλ�ü�ⷽ���£����ŷ����Ⱥ�ת�ٲ��ɼ��.��Դ����⣬�������һ�ֵ���ʽ�ŵ����������ƣ��˱��������ڽϸ�ת���·���16 λ�ֱ��ʵ�ת��λ���źţ����ö�ʱ�ͺ��λ�÷�����ʽ����ͬ��������һ����ʱ�����̶�ͨ��Ƶ���ϱ����ԽǶȣ�ͨ�ſɿ��Ը�.�˻����ϣ���������˻��ڴ˱�������λ�÷����ͺ�������������ͬ�������ʸ�����Ʒ���.�����ʵ�����������˷����ɹ�ʵ���˶Ը��ٵ�����ŷ�����.
����1 �����ŵ���������
����1.1 ���Ҫ��
��������ʸ������Ҫ����������������ص�.
����(1)��ת�����������������ת�ӽǶ�.���ܲ��ù�������ʵʱ�����ķ�ʽ.
����(2)��ת����ת������С������ǿ�Ƚϸߣ�����.Ϊ���������תʱ��Ħ���� ת�ӺͶ���֮�������ȫ�Ӵ�.
����(3)����ܹ��߾��ȶ�λ��Ҫ��������нϸߵķֱ��ʺ;���.
����1.2 ��ɺ��ź�
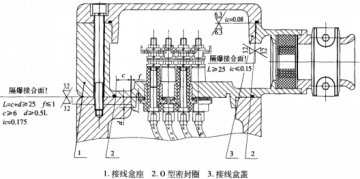
������������Ҫ��������Ĵŵ�ʽ�������ṹ��ͼ 1 ��ʾ.
�������������źŷ������ֺ��źŴ���������ɣ� �źŷ���������ͨ���ŵ�ЧӦԭ�������ܹ���ӳ����һ��ת���Ĵų�����Ķ����ѹ�ź�; �źŴ������ֶԵ�ѹ�źŽ��з����� ���ݶ����ѹ�ź���ų�λ�õĶ�Ӧ��ϵ�� �õ���(�ų�)��һ���ڵľ���λ�ã� ���ŷ�����ϵͳ����ͨ��ʱ�� �ϱ������λ����Ϣ.����ͨ�Ų��ֲ���ͬ������ͨ��.
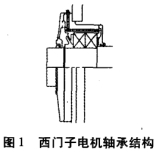
����1.3 ����������ԭ�����źŴ�����ʽ���Լ��ŵ�ʽ�������źŷ���������ͼ 2
������ʾ����Ҫ��������(ת��)�ʹ���Ԫ��(����)���.������ֻ��һ�Դż��� ����ǿ�Ų����������ƳɵĴŸ�
�������� �̶��ڵ��β���ϣ� �ð뵼�����Ԫ��������Ԫ���� װ�ڵ��β���˸��ϣ� �����ͽ��õ������ ת���˶����� ʵ���˱��������ӡ� ת�Ӿ�ȷ�����Ӵ�������˶�.��������תһȦ�� �ų��仯һ���ڣ� ÿ�����Ԫ�����һ�����ڵĵ�ѹ�źţ���һ���ڣ�����ת��(������)λ��(0°~360°)������ѹ�ź����Ψһ��Ӧ.�ɼ����ڸ�Ӧ������ӦƵ����ͬ�������£�����ڹ�������һ���ڸ�Ӧ������(���ڷֱ���)�źŵĹ�����ʽ�����ַ�ʽ���ڸ���ת������Ч����ת��λ��.Ϊ��֤�������ľ��ȣ���Ʋ��������ź������нǶ��ж�.3 �� 6 ������Ԫ������Բ���Ͼ��ȷֲ�����λ�� 180°�� 2 ������һ�飬ÿ��Ԫ��������źž���ֺ���Ϊһ���źţ����������������Ʈ�ơ���ģ�����Լ���е��װ���ȴ������ź����.�������ֶԸ������źŽ�����Ӧ�Ĵ��������ɵõ�ת��λ��.ת�Ӵų���תһ�ܣ�����������Ӧ��ѹ�ź�������ͼ 3 ��ʾ.
����Ϊ��ø���Ĵ����ٶȺ;��ȣ� ���ı��������û��ڲ����ʽ���źŴ����㷨.����ͨ��������Уϵͳ�� ��������ת��(�ų�)��е�Ƕ�(0°~360°)�� �붨��(����Ԫ�������)�����ѹ�ź�֮��Ķ�Ӧ�Ĺ�ϵ�Ƴ����ݱ����洢����.����������ʱ��ֻ��Ҫ���������ѹ�źţ� ���������ݱ����ҵ����Ӧ�ľ��ԽǶ�.�������������ʽ�ŵ���������õķ��������ݴ������������������ؼ������㣬�ܴ�̶���������źŴ����ٶ�.ʵ��Ӧ���У��Ƚ��Ÿֻ�(ת��)��3�Դ���Ԫ��(����)��װ�ڵ���ϣ�����УϵͳУ����ÿ̨������������֮�佨��һ��һ�����ݱ�����������Ч�����е�ӹ���װ�侫�ȶԱ��������ȵ�Ӱ��.������ϵͳ�� AD �����ֱ���Ϊ4096����ֺ�ķֱ���Ϊ8192����Ӧ�����ݱ�����ԼΪ24576���Ƕ�ֵΪ16λ������ҪԼ25×103�ֽ�(16λ)�Ĵ洢�ռ�.��������Ĵŵ�������� �Ի�е���ȡ��ų���ģ���źŵ����Զ�Ҫ���ߣ�ͨ�������ź������Ľ�Уϵͳ����߱��������ȵ�DZ����.
����1.4 ����ʱ����ͺ�ʱ��
�����ӹ���ԭ����֪������ı���������һ�������������ʵʱ�ϱ��Ƕȣ������ñ����Ķ�ʱͬ������ͨ�ŵ���ʽ�ϱ��Ƕ�.ͨ�ŷ�ʽ��ͼ4��ʾ�����������ŷ�����ϵͳͨ��ͬ�����нӿ���ȫ˫��ͨ��ģʽ��ʵ�ֽǶ��ϱ�.
����ͼ 4 ����ͨ�Ŷ�(Master)��������ϵͳ�� ��ͨ�����õ��ķ����Ƕȣ� �Ǵ�ͨ�Ŷ�(Slave)һ��ʱ��֮ǰ�IJ����������.�ڸ�ת���£� ���ʱ�������ת��λ���ź��ͺ���Ϊ���ԣ�
����ֱ�ӰѴ˷����Ƕ���Ϊ��ǰת�ӽǶȽ���ʸ�����ƣ���ʹ����ʸ��ƫ����ȷ��������ʱ����ɿ���ʧЧ������ȷ�����ͺ���.Ҫ������ͺ���������Ҫͨ����������������ʱ��õ��ͺ�ʱ��.�������Ĺ���ʱ����ͼ5��ʾ����n���ڿ�ʼʱ�̣��������������ͨ�ţ��õ���n���Ƕȷ���
����.ͨ�Ž�������һ���ڲ�������Ľ��n1Ϊ��һ����Ҫͨ�ŷ����ĽǶ�n *1��ֵ.���������е�n ���ڵIJ������㣬�õ��Ƕ�n����Ҫ�ڵ� n+1 ������ͨ�Ž����ű������� n+2�����ڵ�ͨ��ֵ*n2.��n+2������ͨ�ŵõ��ĽǶȷ���n *2���ǵ�n�����ڵIJ���������n����*n n 2 .�ӵ� n ���ڲ�������n�Ŀ�ʼʱ�̣����� n+2 ���ڵĿ�ʼʱ��(����ϵͳ��Ҫͨ�ŵõ�n *2 )�����ʱ�伴�ǽǶȷ���n *2���ͺ�ʱ��.
����ͼ 5 ��һ�����ڼ��ŷ�����ϵͳ�IJ����Ϳ�������Ϊ Ts��ͨ��ʱ����Ϊtc�� ͨ�Ž�����ֵ�ͽ�����������жϵ�ʱ����te����ÿ������tc+teʱ�����в���.��Ƕ��ͺ�ʱ���� 2Ts-(tc+te)���ÿ������ڵı�����ʾΪκTs����

����2 ���ٵ��ʸ������
����2.1 ����ͬ�����ģ����ת��d-q�����ڣ������ӵ���ʸ��i�ֽ�����ŵ�������id��ת�ص�������iq���������������˴˶������ɷֱ����.��ͼ6��ʾ.
����������ͬ����������¼��裺
����(1)�������������ȫ�Գƣ�����ݲ�ЧӦ�� �����϶�����ڿռ������ҷֲ�;
����(2)��о���������ͼ�������ĺ��Բ���;
����(3)����©��ͨ��Ӱ�죬 ���Դ���ת�ص�Ӱ��;
����(4)ת��Ϊ�����壬�������ֵ��С�㶨Ϊf ��
��������϶�г����ҷֲ�.���ڹ����ڵͱ������� ��������ͬ������Ľ���ֱ���нӽ��� ���Ը�������ͬ���������ѧģ�Ϳ��Բ�������ģ��

����ʽ�У�uq��udΪ�任��ĵ������ֱ���ѹ;iq��idΪ�������ֱ�����;pΪ���������;fΪ����������Ĵ���.�����ת�ط���ʽΪ

����2.2���ƹ��̷���
�������ƹ�����ͼ7��ʾ�����������������Clerke�仯��Park�任�õ�����ֵid��iq ��������ֵ�����ָ����в�ֺ��������͵õ�d-q���ѹud��uq��d-q���ѹ�پ���Park�任��Clarke�任����任�ɵõ�������������ѹָ��ua��ub��uc�����������Ƶõ�������ʽ��·�����źţ��������ʿ����������磬����ת�����������ת��

���������ӵ�ѹ�ڶ��Ӿ�ֹ����ϵ��ת������ϵ���ÿռ�ʸ������ʽ��ʾΪ��

������Vdq������תʸ������eje��ʵ�ֶ��ӵ�ѹ��ת����ת����ϵ����ֹ����ϵ�ı任����Park��任����

����ͼ8Ϊ���������ͼ��㡢PWM �����ʱ���������IJ���Ƶ�������Ƶ��ͬ������ÿ���������ڿ�ʼʱ����.
�������ڲ�������ɢ�����㷨��PWM����ͺ���һ���������ڣ�PWM�����t+Ts ��t+2Tsʱ������Ч.�ھ�ֹ����ϵ�£���t+Ts��t+2Tsʱ���ڶ��ӵ�ѹʸ��ӦΪ

������ʽ(7)��ʽ(8)���Կ�����ʵ�ʵĵ�ѹ���������ĵ�ѹ�������һ���������.�˱������ɱ�ʾΪ��

������ʽ(9)���Կ����� ��ѹʸ���ķ�ֵ˥���� ��λ�ͺ� 1.5 ����������. PWM Ƶ��һ���� ���ת�ٽϸ�ʱ�� PWM Ƶ���������ѹ�Ļ���Ƶ�ʵı�ֵ��С����λ�ͺ�ϴ� ��������ͺ���в����� �����ͺ��ʹ�õ����������Ķ�̬��Ӧ�仵�� ����ʱ�����ϵͳ���ȶ�.
��������λ�ͺ��Ƿdz��������£� ��ֵ˥����С�� Ϊ���������ͺ������Ӱ�죬 ���Բ�����λ��ǰ��ʽ���в����� ����ʵ�ֶ��ӵ�ѹ��ת������ϵ�����ྲֹ����ϵ�ı任ʱ������תʸ�����ӣ� ������Ķ��ӵ�ѹʸ��Ϊ

����2.3 �Ƕ��ͺ�����
�������ٵ��ʸ�����ƹ����У� ת��λ�þ���ֱ�Ӿ����˵���ʸ���Ŀ��ƾ���.�������������ڿ������ڿ�ʼʱ�̽��У� ��ͨ����������������ʱ��(���� 1.4 ��)��֪�� ��ʱ�� ����ϵͳ�õ��ĽǶȷ����ͺ�ʱ��ΪκTs.�������������У�ת��Ϊω����ǶȲ�����(�ͺ���)Ϊc s = T (11)
����2.4 ����������
���������������ʱ����ʽ(11)���㲹�����������������.���ڵ���Ӽ�������ʱ�� ����ʽ������IJ���������һ�����������Դ������з���.�Ƕ��ͺ�ʱ��̣ܶ������Ǵ�ʱ���ڵļ��ٶȱ仯.�����ĽǼ��ٶ�Ϊ�� ������������ʽ�У� ת��ת��Ϊδ����ǰ�ǶȲ���֮ǰһ�����ڵ�ƽ���ٶ�.�����������ʱ��˲ʱת��ӦΪω+a( Ts/ 2) Ts ����Ӧ�ͺ�ʱ�� κTs�� �ǶȲ�����ӦΪ��

�����Ƚ�ʽ(11)��(12)��ʽ(11)������Ϊ

������ʵ��ϵͳ�У������������� Ts=50s��ͨ��ʱ��tc=8s��ͨ�Ž�����������������жϵ�ʱ��te=2s������ʽ(2)����κ=1.8����

�����輫�������Ϊ�����0.1s�Ӿ�ֹ�����ٵ�100000r/min�����Ǽ��ٶ�=0.000�� 006°/s2.����ʽ(11)���������ɴ˼��ٶȲ����IJ������λ�����Ϊc =0.037 8°.����Ƕ�ƫ��Կ��Ƽ����Ӱ���������Ժ��ԣ�����ȫ����ʽ(11)�����ͺ��������迼�Ǽ��ٶȴ�����Ӱ��.
����3 ʵ����֤
������Ƶĵ���ʽ�ŵ���������û�������������Ϊ200kHz�����ǵ���Ӧ��λ�ͺ��Ӱ�죬��Ƶ��10kHz���ڵ�ģ���ź���Ӧ����Ϊ��ʧ�棬����������ת�ٿɴﵽ600000r/min.������ʵ����ͼ 9��ʾ.
�����˱��������16λ����ֵ�Ƕȣ������ܴﵽ12λ(Լ 5.27′)���ϣ�������ٵ���Ա������ľ���Ҫ��.���ٵ������ƽ����ѣ�Ϊ����֤����������Ʒ�������Ч�ԣ������һ̨4�Լ����ת��Ϊ20000 r/min�������Ϊ600W�ĵ��.ʵ��ƽ̨�����Ѱ�װ�˵���ʽ�ŵ�������ĸ�������ͬ�����������ϵͳ�� ʾ�����͵��Ӳ����ǣ���ͼ10 ��ʾ.
���������£��ٶ�ָ�����ӵ�15000r/min�������ٿ��ƣ����Ӳ�������ʾ���ٶ�Ϊ15007r/min;�ٶ�ָ��ӵ�20000r/min�������ٿ��ƣ����Ӳ���������ʾ���ٶ�Ϊ20010r/min.��Ƭ���ڲ���ʱ�����ⲿ�������������Ͳ������ȶ�����ɸ����Ŀ�������.ת���趨�ֱ�Ϊ15000r/min�� 20000r/min ʱ�ĵ������������ηֱ���ͼ 11(a)��(b)��ʾ.
������ͼ11���Կ����������仯Ƶ��Ϊ�ٶȵ� 4������ֵ�ȽϾ��ȣ��ﵽ��Ԥ�ڵĿ���Ҫ��.
����4 �� ��
�������������һ�����õ����ŵ������ʵ�ָ��ٵ��ʸ�����Ƶķ���.�ñ�������ͨ�Ŵ���������ʽ������ͬ������ͨ�ŷ�ʽ�ϱ��Ƕȣ���������ʸ��������Ҫ.����ϵͳͨ���ڸ��������ж�ʱͨ�Ż��ת�Ӿ���λ�ã������ź��ͺ������λ�÷��������в������õ�ȷ��λ���źţ��Ӷ��ɶԸ�������ͬ�����ʵ��ʸ������.ʵ����ת��Ϊ20000r/min����������֤�˸ñ������Ϳ��Ʒ�������Ч��.������������ַ�����Ч������λ�ô�����ʵ���˸��ٵ��ʸ������.
Ͷ�����䣺chuanbeiol@163.com ��������ʴ������ߣ�http://www.guangyuanol.cn/